摘要:尽管导航与定位已经深入到人们的日常生活,但是导航与定位的含义经常被混淆,而且绝大多数教科书和文献也没有刻意区分这两个既有联系又有区别的概念。本文试图分别给出导航与定位的定义与内涵,讨论导航与定位的联系与区别,描述导航定位分类,简述导航与定位的交叉发展史。试图从学科发展、应用领域的发展讨论导航定位涉及的研究内容,侧重讨论导航与定位未来的重要研究方向。需要强调的是,本文只讨论一般意义的导航与定位,尽管卫星导航定位是重点描述内容,但不特指目前快速发展的卫星导航定位。
引言

定位是人类社会活动、经济活动、军事活动的重要支撑。高精度定位是地球科学研究的基础,内部地球物理、地壳运动、海洋活动、地震等都需要毫米级精度的定位;边界划分、土地测量、工程建设等需要厘米甚至毫米级精度的定位。日常生活中人们更需要连续实时导航定位。行人在陌生的城市、森林和无垠的沙漠戈壁需要导航、定位和定向,车辆行进在陌生的道路和城市需要参照、需要导航,舰船航行在浩瀚的海洋需要标志和定向指引,飞行器遨游太空也需要导航定位。
国防建设更离不开导航定位。军事行动、指挥平台、武器平台等都需要导航定位的支持。

添加微信好友, 获取更多信息
复制微信号
导航定位是信息技术(information technology,IT)和数据技术(data technology,DT)开发与应用的基础。信息化社会中(无论是数字地球还是智慧城市),约80%的信息都与空间和时间有关。于是,导航定位所提供的三维位置、三维速度和时间信息是信息化建设的重要内容,也是数字地球、智慧城市建设十分重要的基础。
涉及导航与定位的著作、文献十分丰富,但是专门讨论定位与导航的区别、联系、发展历程的文献并不多。而且导航与定位概念经常混淆。此外,在全球卫星导航定位系统发展之前,导航与定位分别附属于不同学科。“定位”属于大地测量学科;“导航”尽管在航海、航空得到广泛研究和应用,但是它一般属于自动控制学科。卫星导航定位系统出现后,导航与定位的界限越来越模糊。从学科发展角度,严格的导航与定位的定义也需要加以规范化论述,尤其需要理清导航与定位的区别与联系,讨论其发展的关联性。
1导航定位定义及其分类
“定位”指的是测定地面、海洋或空中一点相对于指定坐标系统的坐标。简言之,测定点的位置就叫定位。定位分为绝对定位(相对于指定坐标系统的位置)和相对定位(相对于其他点的位置);定位可按单点进行位置测定,也可按整网的一部分进行测定。定位也分静态定位和动态定位,静态定位指的是载体在静止状态进行的定位,动态定位指的是载体在运动状态下进行的连续、实时定位。
“导航”指的是采用定位手段和控制 *** 确定运动载体当前位置和目标位置,并参照地理和环境信息引导运动载体沿着合理的航线,抵达目的地的过程。简言之,导航就是引导航行。
导航一定需要定位,且需要动态、实时、连续定位,但定位不等于导航。导航含有控制、引导、参照等概念。
定位种类繁多,有静态定位、动态定位、动静态定向、匹配定位等。静态定位 *** 有:三角测量、导线测量、天文测量、水准测量、静态卫星定位等;动态导航定位的 *** 有:惯性测量、无线电导航定位、动态卫星导航定位等。定向 *** 有:天文定向、罗盘定向、指南针定向、卫星定位定向;匹配导航定位 *** 有:重力匹配、磁力匹配、影像匹配、景象匹配定位等。
导航定位设备有观测设备、航标信息和控制系统等。观测设备包括光学天文观测设备、指南针、罗盘、惯性系统、地磁传感器、重力传感器、光学传感器及无线电接收或发射设备等;航标信息包括无线电信标、环境信息、影像信息、地理信息及地磁和重力场先验信息等与地理坐标关联的信息。控制系统包括控制硬件、软件和算法等。
2导航定位发展简史
中国古代人早已采用目视法观测北斗星进行定向,大约在公元前2697年,黄帝和炎帝联军与蚩尤战争时期,已经发明了指南车。公元27-97年间,发明了地磁指南针,也称为“司南”,即利用地磁场南北极属性,将两极磁体做成罗盘,罗盘的指针能给出任一方向的方位或角度值(南北极除外)。我国古代指南针为我国与世界交流作出了重要贡献,无论是秦汉时期中国与朝鲜和日本的海上往来,隋唐五代中国与 *** 各国之间的贸易往来,宋代航行在南太平洋和印度洋航线上的大量中国商船队,还是明代初期航海家郑和“七下西洋”,指南针都发挥了重要作用。
具有科学意义的几何定位大约始于公元前三世纪,埃及学者埃拉托色尼(Ero tosthenes)发现亚历山大城和赛尼城位于同一子午线上,而且发现夏至日正午日光在赛尼城直射井底,即太阳的天顶角为零,而此刻亚历山大城太阳光则存在倾角,他通过观测日晷或垂直杆上的阴影长度得出日光与垂线方向形成的角度是一圆周的1/50(即日光南偏7°12'),由此他推算出地球半径6267km,误差约2%™。公元723年,我国唐朝高僧一行和尚(张遂)带队在林邑(越南顺化)、安南都护府(越南)、朗州武陵(湖南常德)、襄州(阳)、阳城(河南登封告城)、洛阳、滑县白马、汴州浚仪、许州扶沟、豫州上蔡、蔚州横野军(河北蔚县)、太原府、铁勒(蒙古乌兰巴托西南)共十三个地方用“复距”仪测量北极高度,并分别测量冬至、夏至、春分、秋分的日影长度,测得各台站的纬度和台站之间的距离,测得极高差1°,南北距离差130.3km,误差21kmm。1615年荷兰学者斯涅尔(W.Snell)创建了三角测量定位法。17世纪末,我国清朝康熙皇帝委托法兰西传教士在中国进行以绘制地图为目的的大规模天文和三角测量定位。建国之初,我国便开始大规模三角测量定位,构建了全国天文大地网。
具有科学意义的物理定位始于牛顿建立的力学原理。1852年,傅科根据牛顿力学原理制成供姿态测量用的陀螺仪,1906年安休兹制成陀螺方向仪,1907年又制成陀螺罗盘。1923年舒拉摆原理的建立为惯导系统的设计奠定了理论基础,1954年惯性导航系统在飞机上试飞成功。之后,液浮陀螺、挠性陀螺、激光陀螺、光纤陀螺以及捷联式惯导系统得到了迅速发展。
无线电定位是导航定位的一次革命,它使得后来的卫星导航定位成为可能。19世纪末20世纪初,无线电技术开始用于导航,导航技术开始飞跃发展。1902年发明了无线电测向技术;1912年研制出了世界上首台无线电导航设备,即振幅式测向仪,也称无线电罗盘(radio compass);20世纪40年代,基于双曲线定位原理研制成功了近程导航系统台卡(DECCA)[]°];上世纪30年代末研制成功了无线电仪表着陆系统(instrument landing system,ILS);上世纪TO年代研发了微波着陆系统;1982年建成了奥米伽甚低频导航系统;1945年建成罗兰(LORAN)A,1958年罗兰C开始投入使用;1945年多普勒导航雷达(Dopple Navigation Radar)系统开始发展;1946年左右,用于航空导航的甚高频全向信标――伏尔(VHF Omni-range,VOR)得到发展;1947年,一种称为甚低频的导航系统――欧米伽(Omega)系统在美国问世,与欧米伽导航原理相类似,俄罗斯研制成功了阿尔法(Alpha)导航系统;1955年,美国研发了近程无线电导航系统,称为战术空中导航系统(tactical airnavigation system,TACAN),简称塔康(TACAN)系统。
卫星导航系统的研制成功,开启了全球整体化导航定位时代。1958年,美国开始研制子午仪卫星导航系统,也称海军导航卫星系统(navynavigationsatellitesystem,NNSS);1973年,美国开始研制全球定位卫星系统(globalpositioningsystem,GPS),1994年正式投入运营;20世纪70年代,前苏联开始研发格洛纳斯卫星导航系统(globalnavigationsatellitesystem,GLONASS),1996年宣布建成;1983年,中国开始研究利用地球静止轨道卫星进行导航定位,1994年正式开始建设,取名为北斗卫星导航系统(BeiDounavigationsatellitesystem,BDS),2000年建成由两颗卫星组成的验证系统,2003年发射第三颗静止轨道卫星,之一代北斗卫星导航系统投入运行;2012年,中国建成了包括14颗工作卫星的区域卫星导航系统(也称北斗二号系统);2001年,欧盟开始建设伽利略卫星导航系统(Galileonavigationsatellitesystem,Galileo),之后日本宣布建设区域准天顶卫星系统(quasi-zenithsatellitesystem,QZSS),印度也开启了印度区域卫星导航系统(Indianregionalnavigationalsatellitesystem,IRNSS)的建设。
卫星导航系统的发展,极大促进了导航定位理论与应用的变革,彻底改变了导航定位手段,也促进了相关产业的长足发展,提高了定位的精度和可靠性,显著降低了导航定位成本,促进了基于位置服务的智慧城市、数字地球、甚至大数据开发等电子服务业的极大发展。
3导航定位研究内容
导航定位领域研究内容十分丰富,包括导航定位平台、导航定位终端设备、各类导航定位模型和计算 *** 及其应用研究。
导航定位平台研究包括:卫星平台、航空平台、水面和水下导航定位平台、惯性导航平台等研究。
导航定位终端设备研制包括:光学经纬仪、电子经纬仪、陀螺、各类导航芯片、天线、接收机等。设备研制一方面需要原理创新,更需要制造业的工艺水平。
导航定位模型和算法研究包括:各类导航传感器观测模型、运动学模型或力学模型、各类误差改正函数模型、观测随机模型以及动力学信息随机模型;导航计算 *** 包括:动态载体定姿定轨 *** ,信号处理、参数估计理论与 *** 、运动控制理论与 *** 、多系统组合定位理论与算法等。
应用研究包括:高精度静态定位及其在坐标基准确定、地壳形变分析、地球动力学中的应用、高动态定位及其在车载、舰载和星载定位或定轨中的应用等。
纯导航研究还包括:定位与地图匹配算法研究、地图辅助导航、室内外无缝导航、重力匹配导航、磁力匹配导航、多系统组合导航(包括多全球卫星导航系统(globalnavigationsatellitesystem,GNSS)融合导航、GNSS与惯性导航系统(inertialnavigationsystem,INS)的松组合、紧组合、深耦合导航等)、完好性研究(不仅包括常用的安全告警,还包括自动 *** 非完好性对导航定位的影响)等。
4未来主要发展方向
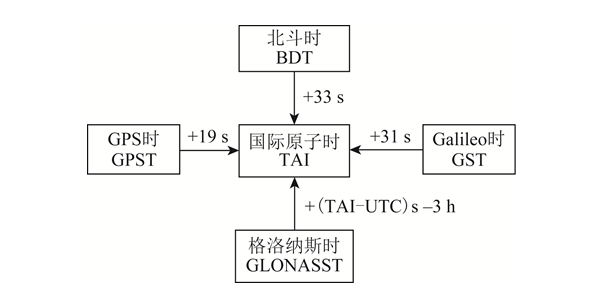
中国导航定位未来主要发展方向:卫星导航定位方面,应侧重多模多频、多GNSS融合导航定位理论与算法研究,侧重多频频间偏差探测与估计、抗干扰和防欺骗硬件与软件设计、兼容与互操作理论与算法(尤其是多系统互操作参数探测与估计)、时空基准统一(侧重多系统联合坐标框架、联合守时理论与 *** )、各类系统误差和有色噪声探测与补偿等研究。
卫星与非卫星组合导航主要发展方向:卫星与伪卫星信号组合导航、GNSS/INS紧组合和深组合硬件与软件设计及其算法、卫星信号与无线保真(wirelessfidelity,WiFi)信号组合导航、卫星导航与重力、磁力、影像匹配导航的组合理论与算法、多系统组合导航的完好性与抗干扰、多系统自适应组合导航的硬件设计及计算理论与 *** 研究等。
针对BDS特色的导航定位研究方面:基于用户与运控中心、用户与卫星之间的链路,构建位置服务(locationbasedservices,LBS)体系和星基增强系统(satellitebasedaugmentationsystems,SBAS)体系;针对BDS三频信号的定位与导航算法;BDS三类星座的综合定轨;新的导航频率设计与利用的可行性与实践;BDS三频(甚至四频)信号组合模型与解算准则;基于多模多频信号组合的周跳探测与修复、模糊参数固定;多模多频异常误差探测、诊断与异常影响控制?多模多频系统误差建模与补偿;多模多频随机模型建立与自适应调整;函数模型与随机模型误差交叉感染的控制与补偿;动态数据融合准则与 *** ,如顾及动力学模型误差的数据融合,顾及有色噪声的动态多模数据融合,顾及互操作参数的多GNSS融合,实时动态数据融合计算 *** 等;基于BDS的各种定位技术,如多频差分定位技术、 *** 实时动态差分(real-timekinematic,RTK)技术、精密单点定位(precisepointpositioning,PPP)、实时动态差分与融合技术等。
5结束语
导航与定位既有联系又有区别。导航源于定位,导航需要定位,但定位又不等于导航。导航是在定位基础上发展起来的引导和控制载体航行的技术。随着定位技术的迅速发展,导航技术也得到飞速发展。定位有绝对定位、相对定位,但导航一般只是相对导航,相对起点、终点和过程参考点的导航;定位有静态定位、动态定位,但导航一般只是动态导航。导航定位的研究内容极其丰富,所有定位研究内容都是导航的研究内容,但是导航研究还包括各种匹配导航与控制理论与 *** 。我国今后导航定位的研究热点应该放在基于BDS及其相关的组合(或融合)导航定位、室内外无缝导航、空中、水下无缝导航、自适应导航、自主导航及其位置服务等。
参考文献(略)
引文格式:杨元喜.导航与定位若干注记[J].导航定位学报,2015,3(3):l-4.(YANGYuan-xi.NotesofNavigationandPositioning[J].JournalofNavigationandPositioning,2015,3(3):l-4.)